黄南藏族自治州网站建设_网站建设公司_Angular_seo优化
目录
- LinkedHashMap详解
- 1、LinkedHashMap的继承体系
- 2、LinkedHashMap的特性介绍和代码示例
- ①、特性
- ②、适用场景
- 使用LinkedHashMap 实现最简单的 LRU缓存
- 3、LinkedHashMap的构造函数
- 4、LinkedHashMap是如何存储元素的,底层数据结构是什么?
- LinkedHashMap的属性注释
- LinkedHashMap的静态内部类`Entry<K,V>`
- 从TreeNode的继承结构引发一个关于设计类继承关系的思考?
- 5、LinkedHashMap的put方法
- `newNode`方法
- `linkNodeLast`方法
- `afterNodeAccess`方法
- `afterNodeInsertion`方法
- 6、LinkedHashMap的get方法
- 7、LinkedHashMap的remove方法
- 8、LinkedHashMap的迭代器
- 9、LinkedHashMap的一些常见问题
- LinkedHashMap 和 HashMap 的区别及适用场景
- 数据结构对比
- 插入和迭代性能
- 适用场景
LinkedHashMap详解
基于JDK8
LinkedHashMap相比于HashMap最显著的一个特性就是维持了插入的顺序,也可以设置其按照访问顺序排序。
1、LinkedHashMap的继承体系
public class LinkedHashMap<K,V>extends HashMap<K,V>implements Map<K,V>
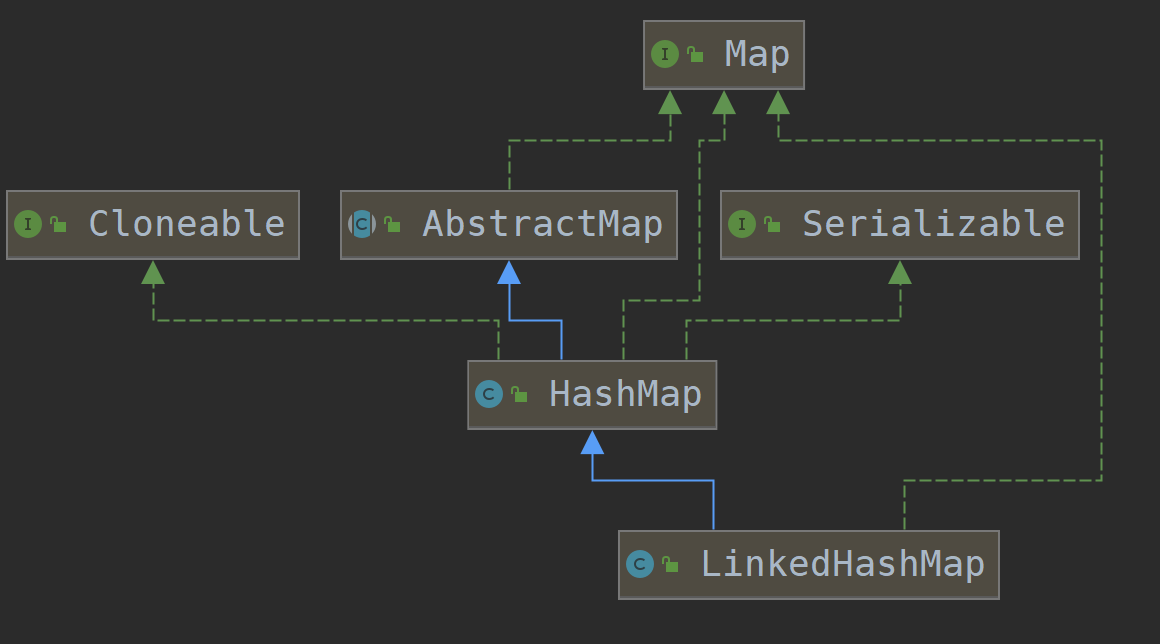
可以看到LinkedHashMap继承了HashMap,所以HashMap能做的事情LinkedHashMap都能做。
还记得HashMap详解这篇文章里面提到的两个方法吗?
afterNodeAccess和afterNodeInsertion 在 LinkedHashMap中就有对应的实现。下面会详细说到。
2、LinkedHashMap的特性介绍和代码示例
LinkedHashMap 是 HashMap 的子类,与 HashMap 类似,它也基于哈希表来存储键值对。但是,LinkedHashMap 维护了一个双向链表来记录插入顺序或者访问顺序,因此具备一些特有的特性和功能。
双向链表在 LinkedList详解这篇文章中有介绍。
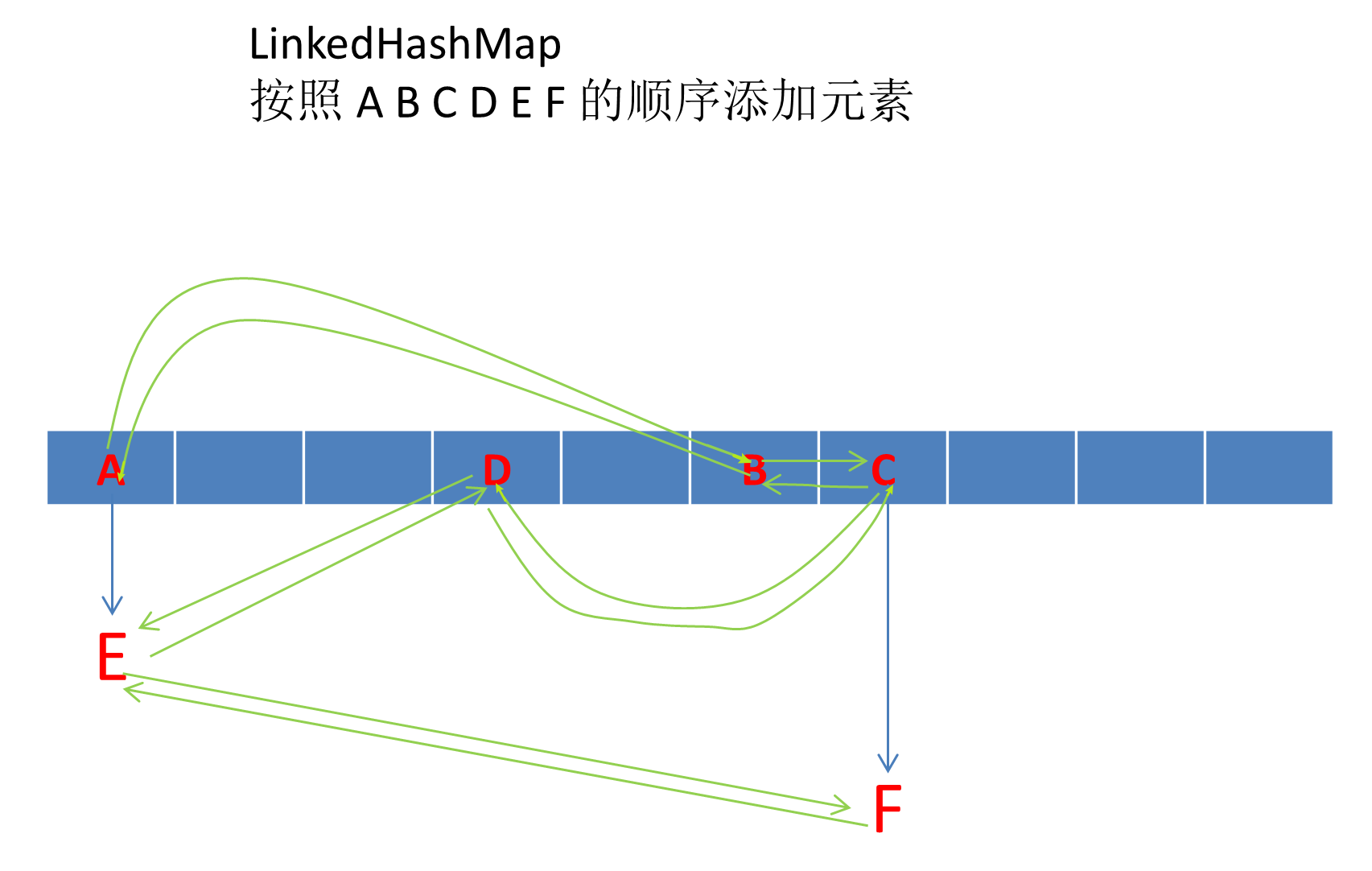
LinkedHashMap 中使用双向链表维护顺序的图示:
绿色连线表示 双向链表的 pre和next指针。
①、特性
插入顺序:默认情况下,LinkedHashMap 按照键值对的插入顺序来维护顺序。
插入顺序代码示例
public static void main(String[] args) {LinkedHashMap<String, String> map = new LinkedHashMap<>();// ========== 演示插入顺序 ===============map.put("a","1");map.put("b","2");map.put("c","3");map.put("d","4");System.out.println("插入顺序遍历:");for (Map.Entry<String, String> entry : map.entrySet()) {System.out.println(entry.getKey() + ": " + entry.getValue());}// 插入顺序遍历://a: 1//b: 2//c: 3//d: 4}
访问顺序:可以通过构造函数设置 accessOrder 参数为 true,使其按照访问顺序来维护顺序。
访问顺序代码示例:
public static void main(String[] args) {Map<String, String> map = new LinkedHashMap<>(16, 0.75f, true);// ========== 插入元素 ===============map.put("a","1");map.put("b","2");map.put("c","3");map.put("d","4");// ========== 访问其中一些元素 ===============map.get("c");map.get("a");System.out.println("访问顺序遍历:");for (Map.Entry<String, String> entry : map.entrySet()) {System.out.println(entry.getKey() + ": " + entry.getValue());}// ========= 最新一次访问的排在最后// 访问顺序遍历://b: 2//d: 4//c: 3//a: 1}
②、适用场景
**需要有序遍历的场景:**当需要按插入顺序或访问顺序遍历键值对时,LinkedHashMap 是一个很好的选择。
**缓存:**由于 LinkedHashMap 可以按照访问顺序来维护键值对的顺序,因此非常适合用来实现 LRU(Least Recently Used,最近最少使用)缓存。
使用LinkedHashMap 实现最简单的 LRU缓存
import java.util.LinkedHashMap;
import java.util.Map;public class TestA {public static void main(String[] args) {// 创建一个容量为 3 的 LRUCacheLRUCache<Integer, String> cache = new LRUCache<>(3);// 添加一些键值对到缓存中cache.put(1, "one");cache.put(2, "two");cache.put(3, "three");// 打印当前缓存内容System.out.println("Cache: " + cache); // Cache: {1=one, 2=two, 3=three}// 访问键 1 的值,使其成为最近访问的条目cache.get(1);System.out.println(cache); // {2=two, 3=three, 1=one}// 添加新的键值对 4 -> "four" 由于超过缓存容量 所以会删除 最近最久没使用的数据cache.put(4, "four");// 打印当前缓存内容,观察最老的条目是否被移除 (2被删除)System.out.println("访问1 添加 4 后的缓存: " + cache); // 访问1 添加 4 后的缓存: {3=three, 1=one, 4=four}// 访问键 3 的值,使其成为最近访问的条目cache.get(3);System.out.println(cache); // {1=one, 4=four, 3=three}// 添加新的键值对 5 -> "five" 由于超过缓存容量 所以会删除 最近最久没使用的数据cache.put(5, "five");// 打印当前缓存内容,观察最老的条目是否被移除 (1被删除)System.out.println("访问3 添加5 后的缓存: " + cache); // 访问3 添加5 后的缓存: {4=four, 3=three, 5=five}}
}// LRUCache 类,继承 LinkedHashMap 实现最近最少使用 (LRU) 缓存
class LRUCache<K, V> extends LinkedHashMap<K, V> {// 缓存的最大容量private final int capacity;// 构造函数,接受缓存的最大容量作为参数public LRUCache(int capacity) {// 调用父类的构造函数// initialCapacity: 初始容量,设置为传入的 capacity// loadFactor: 负载因子,设置为默认值 0.75F // accessOrder: 设置为 true,表示按照访问顺序排序super(capacity, 0.75F, true);this.capacity = capacity; // 初始化缓存容量}// 重写 LinkedHashMap 的 removeEldestEntry 方法// 当添加一个新的键值对时,此方法会被调用,以判断是否需要删除最老的条目@Overrideprotected boolean removeEldestEntry(Map.Entry<K, V> eldest) {// 当缓存元素个数大于我们设置的容量时 删除 最近最少使用的缓存元素return size() > capacity;}
}3、LinkedHashMap的构造函数
- ①、空参构造
public LinkedHashMap() {super(); // 调用父类(HashMap)的空参构造accessOrder = false; // 不按照访问顺序排序}
- ②、有参构造1
接收 initialCapacity 初始容量 loadFactor 负载因子
public LinkedHashMap(int initialCapacity, float loadFactor) {super(initialCapacity, loadFactor); // 设置自定义的哈希表容量 和负载因子accessOrder = false; // 不按照访问顺序排序}
- ③、有参构造2
接收 initialCapacity: 初始容量 loadFactor: 负载因子 accessOrder: 是否按照访问顺序排序
上面实现的LRUCache就是用的这个构造方法。
public LinkedHashMap(int initialCapacity,float loadFactor,boolean accessOrder) {super(initialCapacity, loadFactor);this.accessOrder = accessOrder;}
- ④、有参构造3
接收一个Map的实现。
public LinkedHashMap(Map<? extends K, ? extends V> m) {super(); // 调用父类(HashMap)的空参构造accessOrder = false; // 不按照访问顺序排序putMapEntries(m, false); // 调用HashMap的 putMapEntries方法}
上面只列举了4个构造函数,还有一个直接收initialCapacity参数的就不列举了。
4、LinkedHashMap是如何存储元素的,底层数据结构是什么?
在HashMap详解的文章中 我们知道 HashMap的数组存储的是 Node<K,V>。
而我们看LinkedHashMap的put方法是直接调用的父类HashMap的put方法。
上面已经介绍过了,LinkedHashMap使用双向链表维护每一个元素的插入顺序。
那么LinkedHashMap是如何实现双向链表的,LinkedHashMap的底层数据结构是什么?
下面就来探讨这两个问题。
在看LinkedHashMap源码之前,我们可以把HashMap和LinkedHashMap 类比ArrayList和LinkedList。
先猜测下LinkedHashMap里面一定也有类似LinkedList的Node节点,并且有pre和next指针实现双向链接。
LinkedHashMap的属性注释
public class LinkedHashMap<K,V>extends HashMap<K,V>implements Map<K,V>
{// 指向双向链表的头节点,即最早插入的键值对transient LinkedHashMap.Entry<K,V> head;// 指向双向链表的尾节点,即最后插入或访问的键值对transient LinkedHashMap.Entry<K,V> tail;// 标识链表是否按访问顺序维护// 如果为 true,则每次访问(get 或 put)某个键值对时,该键值对将被移到链表尾部final boolean accessOrder;
}
可以看到LinkedHashMap是通过 LinkedHashMap.Entry<K,V>这个内部类 来保存链表节点的。
LinkedHashMap的静态内部类Entry<K,V>
// LinkedHashMap 的静态内部类 Entry,继承自 HashMap.Node
// 此类在 LinkedHashMap 中用于维护双向链表,以记录键值对的插入顺序或访问顺序
static class Entry<K,V> extends HashMap.Node<K,V> {// 指向链表中前一个节点的引用Entry<K, V> before;// 指向链表中后一个节点的引用Entry<K, V> after;// 构造函数,用于创建一个新的 Entry 节点// hash: 键的哈希值// key: 键// value: 值// next: 指向哈希表中下一个节点的引用(用于处理哈希冲突)Entry(int hash, K key, V value, Node<K, V> next) {// 调用父类 HashMap.Node 的构造函数,初始化 hash, key, value 和 nextsuper(hash, key, value, next);}
}
可以看到不仅LinkedHashMap继承了HashMap,就连LinkedHashMap保存的元素 Entry都是继承HashMap的Node Entry<K,V> extends HashMap.Node<K,V> ,LinkedHashMap.Entry在HashMap.Node的基础上 添加了两个属性before和after用来保存链表的前一个和后一个引用。
可以看下内部类的继承图:
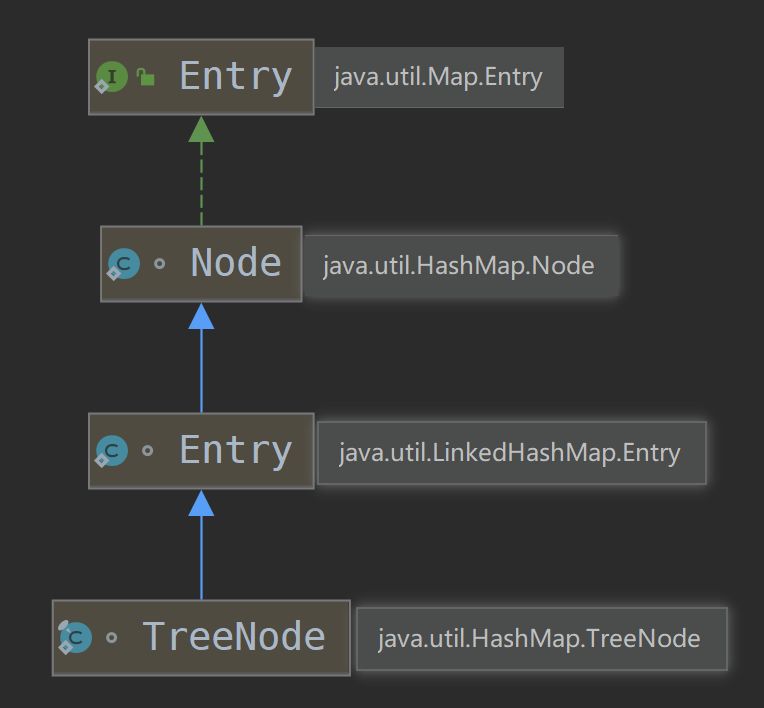
图中可以看到,还有个TreeNode(红黑树的节点)是继承Entry的。
我在HashMap详解的文章中并没有去看 TreeNode的源码,因为实现红黑树数据库结构的源码比较多,也比较难理解。要想写好注释 比较费力。
从TreeNode的继承结构引发一个关于设计类继承关系的思考?
为什么在TreeNode和Node之间 还要搞个Entry来实现链表的功能,不如直接在Node节点加上before和after属性实现双向链表功能得了,这样还省事就不用再写一个Entry夹在中间了是不是。
这样做当然是可以的,只不过这样设计会使得HashMap本身不需要链表结构的每个元素都有before和after属性,当元素存储很多的是时候对于空间来说是浪费的。 如果再设计个Entry夹在中间,LinkedHashMap需要双向链表结构就用Entry,但是TreeNode有时候需要双向链表(比如LinkedHashMap需要转红黑树的时候),有时候不需要双向链表(比如HashMap需要转红黑树的时候)。这个时候的TreeNode不管需不需要双向链表结构,都是已经继承Entry的了,所以会多出before和after属性。
在HashMap需要转红黑树的情况下继承Entry实际上是一种空间浪费,但是别忘了概率, hash 值如果足够随机,则在 hash 表内按泊松分布,在负载因子 0.75 的情况下,长度超过8的链表出现概率是0.00000006。这么低的概率正常情况下注定红黑树节点在哈希表中不会有很多。
所以这么分析下来 搞个Entry夹在中间是个非常不错的设计。 既节省了HashMap的Node节点的空间占用,Entry又复用了Node的代码,TreeNode又复用了Entry的代码,实在是妙呀!
5、LinkedHashMap的put方法
是的你没有看错,LinkedHashMap并没有重写HashMap的put方法,直接调用的就是HashMap的put方法。
public V put(K key, V value) {return putVal(hash(key), key, value, false, true);}
那LinkedHashMap在put元素的时候又是如何把每个元素都链在一块形成双向链表的呢?
LinkedHashMap实际上并不需要整体重写put方法,只需要重写newNode方法即可。
HashMap的newNode方法
Node<K,V> newNode(int hash, K key, V value, Node<K,V> next) {return new Node<>(hash, key, value, next);}
LinkedHashMap在重写的newNode方法中新建LinkedHashMap.Entry<K,V>元素。然后把元素链接到链表的尾部。
newNode方法
@Override
Node<K, V> newNode(int hash, K key, V value, Node<K, V> e) {// 创建一个新的 LinkedHashMap.Entry 节点,并初始化其哈希值、键、值和下一个节点指针LinkedHashMap.Entry<K, V> p = new LinkedHashMap.Entry<>(hash, key, value, e);// 将新节点插入到双向链表的尾部linkNodeLast(p);// 返回新创建的节点return p;
}linkNodeLast方法
private void linkNodeLast(LinkedHashMap.Entry<K, V> p) {// 当前的尾节点LinkedHashMap.Entry<K, V> last = tail;// 将新节点设置为尾节点tail = p;if (last == null) {// 如果链表为空,新节点即为头节点head = p;} else {// 否则,将当前尾节点的 after 指针指向新节点p.before = last;last.after = p;}
}afterNodeAccess方法
还记得 HashMap详解这篇文章中提过这个方法吗
LinkedHashMap就重写了 HashMap给的扩展方法。
afterNodeAccess 方法在访问节点后调用,用于将被访问的节点移动到双向链表的尾部。
这对于按访问顺序维护的 LinkedHashMap 特别重要。
@Override
void afterNodeAccess(Node<K, V> e) { // move node to lastLinkedHashMap.Entry<K, V> last;// 检查是否按访问顺序维护链表,并且被访问的节点不是当前的尾节点if (accessOrder && (last = tail) != e) {// 将节点 e 转换为 LinkedHashMap.Entry 类型LinkedHashMap.Entry<K, V> p = (LinkedHashMap.Entry<K, V>) e;// 获取节点 p 的前一个和后一个节点LinkedHashMap.Entry<K, V> b = p.before, a = p.after;// 将 p 的 after 指针置为 null,表示它将成为新的尾节点p.after = null;// 更新前一个节点和后一个节点的指针if (b == null)head = a; // 如果 p 没有前一个节点,则它是头节点,更新头节点为 aelseb.after = a; // 否则,将前一个节点的 after 指针指向 aif (a != null)a.before = b; // 如果 p 有后一个节点,将后一个节点的 before 指针指向 belselast = b; // 如果 p 是当前的尾节点,更新 last 为 b// 如果 last 为空,表示链表为空,将 p 设置为头节点if (last == null)head = p;else {// 否则,将 p 插入到链表尾部p.before = last;last.after = p;}// 更新尾节点为 ptail = p;// 增加修改计数,以反映结构性修改++modCount;}
}afterNodeInsertion方法
afterNodeInsertion 方法在插入节点后调用,用于检查是否需要移除最老的节点(头节点)。
这对于按插入顺序维护的 LinkedHashMap 特别重要。
@Override
void afterNodeInsertion(boolean evict) { // possibly remove eldestLinkedHashMap.Entry<K, V> first;// 如果需要移除元素,并且头节点不为空,并且需要移除最老的节点if (evict && (first = head) != null && removeEldestEntry(first)) {// 获取头节点的键K key = first.key;// 根据键移除节点removeNode(hash(key), key, null, false, true);}
}看了上面的代码注释就会明白,afterNodeAccess和afterNodeInsertion方法的主要目的都是为了实现按照访问顺序处理元素的位置。
6、LinkedHashMap的get方法
LinkedHashMap重写了 HashMap的get方法,主要新增了按访问顺序维护链表的功能。
@Override
public V get(Object key) {Node<K, V> e;// 调用 HashMap 的 getNode 方法,使用键的哈希值查找节点if ((e = getNode(hash(key), key)) == null)// 如果节点不存在,返回 nullreturn null;// 如果 accessOrder 为 true,表示按访问顺序维护链表if (accessOrder)// 调用 afterNodeAccess 方法,将访问的节点移动到链表尾部afterNodeAccess(e);// 返回节点的值return e.value;
}afterNodeAccess在上面已经详细注释了。
7、LinkedHashMap的remove方法
LinkedHashMap的remove方法在设计上和put方法有相似之处,LinkedHashMap并没有重写HashMap的remove方法,而是重写了afterNodeRemoval方法,在删除节点时维护双向链表。
void afterNodeRemoval(Node<K, V> e) { // unlink// 将节点 e 转换为 LinkedHashMap.Entry 类型LinkedHashMap.Entry<K, V> p = (LinkedHashMap.Entry<K, V>) e;// 获取节点 p 的前一个和后一个节点LinkedHashMap.Entry<K, V> b = p.before, a = p.after;// 将节点 p 的 before 和 after 指针置为 nullp.before = p.after = null;// 更新前一个节点和后一个节点的指针if (b == null)head = a; // 如果 p 没有前一个节点,则它是头节点,更新头节点为 aelseb.after = a; // 否则,将前一个节点的 after 指针指向 aif (a == null)tail = b; // 如果 p 没有后一个节点,则它是尾节点,更新尾节点为 belsea.before = b; // 否则,将后一个节点的 before 指针指向 b
}最后再整体看下HashMap中留给LinkedHashMap扩展的几个方法:
// Callbacks to allow LinkedHashMap post-actions// 在访问节点(即调用 get 方法)后调用。// 主要用途:LinkedHashMap 重写此方法,用于在访问一个节点后将其移动到双向链表的尾部,以维护访问顺序void afterNodeAccess(Node<K,V> p) { }// 在插入新节点后调用 // 主要用途:LinkedHashMap 重写此方法,用于在插入新节点后检查并移除最老的节点,以维护固定大小的缓存或按照插入顺序迭代。void afterNodeInsertion(boolean evict) { }// 在删除节点后调用// 主要用途:LinkedHashMap 重写此方法,用于在删除节点后调整双向链表的指针,确保链表的完整性。void afterNodeRemoval(Node<K,V> p) { }
其中afterNodeInsertion方法的参数 boolean evict,该参数指示当前的操作是否在创建模式下。如果为 false,表示哈希表处于创建模式;如果为 true,表示哈希表处于正常操作模式。此参数通常在初始化哈希表时使用,以避免在创建模式中触发删除操作。
evict 参数为 false 的情况:
在哈希表初始化时,通过 putMapEntries 方法调用 putVal,设置 evict 为 false。 HashMap的readObject反序列化方法也会调用 putVal,设置 evict 为 false。
evict 参数为 true 的情况:
正常操作(非创建模式)下,插入或更新元素时,evict 为 true,允许执行淘汰策略。
8、LinkedHashMap的迭代器
LinkedHashMap的迭代器可以对比 HashMap详解 这篇文章的 HashMap的迭代器来学习。
二者本质的区别是由 LinkedHashMap 维护了双向链表而决定的。 LinkedHashMap的迭代器不会像HashMap的迭代器那样遍历全部的数组节点,而是通过双向链表的头结点,以及after指针一个一个往下遍历,这种方式就少了HashMap那种遍历全部数组节点的过程,直接通过after指针就能遍历全部的元素,这种方式比 HashMap 的迭代更为直接高效。
abstract class LinkedHashIterator {// 下一个要返回的节点LinkedHashMap.Entry<K,V> next; // 当前的节点LinkedHashMap.Entry<K,V> current; // 用于快速失败的期望修改计数int expectedModCount; // 构造方法LinkedHashIterator() {// 初始化下一个节点为链表的头节点next = head;// 初始化期望的修改计数,等于当前的修改计数expectedModCount = modCount;// 初始化当前节点为nullcurrent = null;}// 判断是否有下一个元素public final boolean hasNext() {return next != null;}// 获取下一个节点final LinkedHashMap.Entry<K,V> nextNode() {// e用于存储当前的下一个节点LinkedHashMap.Entry<K,V> e = next;// 如果哈希表的修改计数与期望的修改计数不同,抛出并发修改异常if (modCount != expectedModCount)throw new ConcurrentModificationException();// 如果下一个节点为空,抛出没有元素异常if (e == null)throw new NoSuchElementException();// 将当前节点设为下一个节点current = e;// 更新下一个节点为当前节点的下一个节点(after)next = e.after;// 返回当前的节点return e;}}9、LinkedHashMap的一些常见问题
LinkedHashMap 和 HashMap 的区别及适用场景
数据结构对比
| 特性 | HashMap | LinkedHashMap |
|---|---|---|
| 数据结构 | 数组 + 链表(红黑树) | 数组 + 链表(红黑树)+ 双向链表 |
| 顺序保证 | 无 | 按插入顺序或访问顺序 |
| 空间开销 | 较低 | 较高(需要额外维护链表指针) |
插入和迭代性能
| 操作 | HashMap | LinkedHashMap |
|---|---|---|
| 插入 | O(1) 平均,O(n) 最坏(哈希冲突) | O(1) 平均,O(n) 最坏(哈希冲突) |
| 删除 | O(1) 平均,O(n) 最坏(未转红黑树的情况) | O(1) 平均,O(n) 最坏(未转红黑树的情况) |
| 查找 | O(1) 平均,O(n) 最坏(未转红黑树的情况) | O(1) 平均,O(n) 最坏(未转红黑树的情况) |
| 迭代 | 与数据插入顺序无关,但是要循环数组 | 按插入顺序或访问顺序,直接遍历链表,性能稍好 |
适用场景
| 场景 | HashMap | LinkedHashMap |
|---|---|---|
| 快速查找和插入 | ✔ | ✔ |
| 需要保证元素顺序 | ✖ | ✔ |
| LRU 缓存实现 | ✖ | ✔ |
| 内存使用较少的场景 | ✔ | ✖ |
-
HashMap:
- 适用于对元素顺序没有要求的场景。
- 高效的查找、插入和删除操作。
- 内存占用较少。
-
LinkedHashMap:
- 需要维护元素顺序的场景。
- 实现 LRU(最近最少使用)缓存。
- 适合需要顺序遍历的场景,且可以按插入顺序或访问顺序遍历。
- 较高的内存开销。